Hackman Room 212



Introduction
The detection and removal of landmines and other unexploded ordnance
in current and former conflict zones is a major humanitarian task that
can be leveraged by the use of technology to address the complexities
and difficulties in correctly identifying mines. The vast majority of
a deminer's time is spent identifying and removing inert underground
clutter. Sophisticated identification and imaging of underground
objects (whether they be landmines or junk; either plastic or metal)
can reduce this wasted time and mitigate the physical danger to the
deminer. This demining technology comes in multiple forms and needs to
work together in a single system to be maximally effective. This
technology includes imaging (with LIDAR-enabled cameras for
landscapes, and with holographic radars for underground objects),
ground-penetrating radar for buried object detection, robotics and field
mobility assessments, real-time communication between different parts
of the overall system, user databases that are populated in real-time
with field data and which are accessible worldwide, wireless data
transfer and communication between robots, sensors, users, and
databases, and interfaces between users and the instrumentation.
With rapid advances in commercial technology, the costs are reduced
while the reliability and capability are increased (these are important
considerations since cost, ease of use, and reliability are important
for the end users of the technology in typically poor and/or
underdeveloped conflict zones). Real-world conditions also dictate
that the technology be field-ready and simple to use in order to be
practical as a tool. These developments and the requirements of the
overall problem point to an integrated technology approach, where
cyber and physical systems communicate, merge, and integrate into a
single, connected, decentralized system that is simple, cheap, and
reliable.



Our Work
Our research group at F&M has been working in tandem with colleagues
from Italy, Ukraine, and Jordan as a
NATO-funded team to
enhance and integrate existing and proven technology and the
techniques that have been developed to address demining in the Ukraine
conflict zone of
Donbass. The team
has been successful in testing object detection and identification
techniques with ground penetrating radars and metal detectors,
automating identification of both above-ground threats (tripwires) and
surface threats (surface-scattered mines), and with terrain analysis
in the Ukraine conflict zone. The integration of these various aspects
of the system and others in progress.
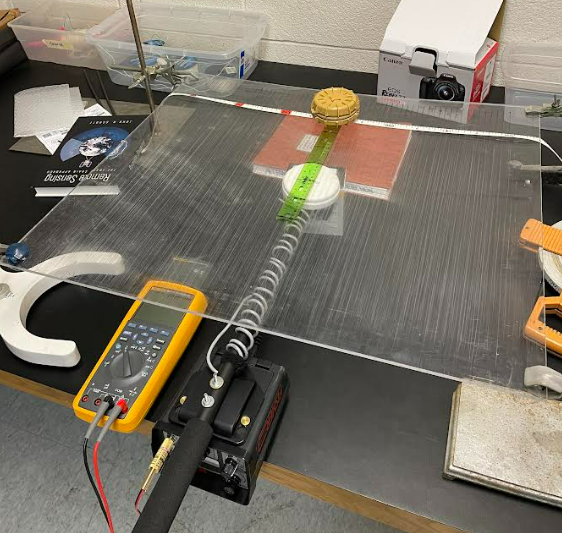
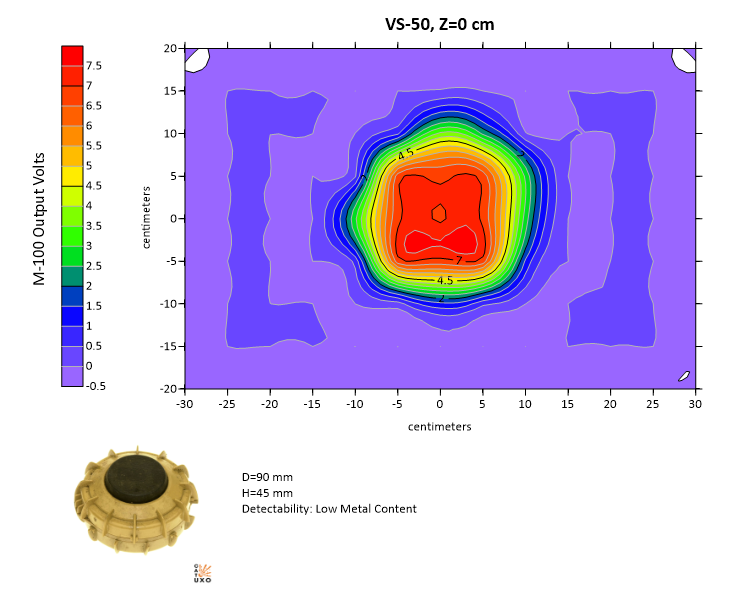

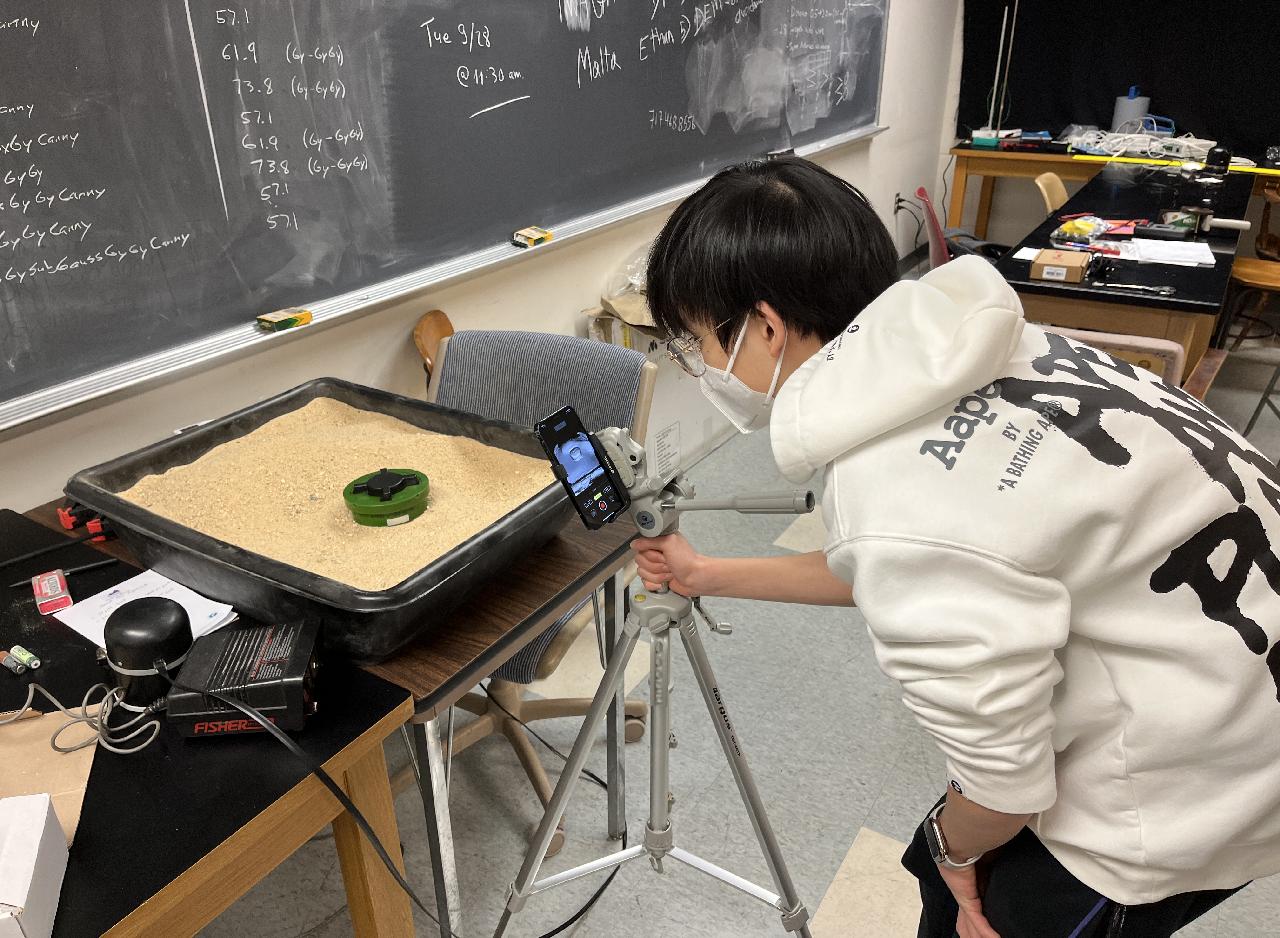
Click to see our metal detector measurements
of landmines.
Click to see our experimental real-time
tripwire detection results in the field.
Our work at F&M focuses on several aspects of the system
development. These include:
- LIDAR imaging and creation of digital elevation models (DEMs) for
the terrain in the Ukraine conflict zone, and how the robot can use
these for navigation and movement decisions. This is necessary because
the terrain is generally uneven with lots of obstacles, which can
block the robot or get it stuck in the minefield.
- Acquiring accurate cm-scale real-time mapping of the ground in
the vicinity of the robot. This is necessary to correct the
holographic radar images for the non-planar ground-air interface
through which the radar signal propagates. This requires accurate
registration between the DEM of the terrain and the coordinate system
of the holographic radar system.
- Developing a matched filtering approach for using LIDAR images to
accurately detect and identify PMA-2 ("starfish") landmines in the
terrain. These mines can have the starfish trigger sticking out above
the ground and are therefore in principle detectable with cameras.
- Investigating (and implementing) automated tripwire detection
(detection of wires through real-time imaging of wires) using
experiments with different infrared, visible, and LIDAR cameras and
with different wire configurations, wire types, and distances from the
camera.
- Using Ukraine terrain data and DEM maps to assess robot
maneuverability in Ukraine mine fields.
- Determining the fraction of area that is suitable for the
selected robot design and ensuring readiness for real-field conditions
to maximize the usefulness of the robot by local operators.
- Field testing Fisher M-101 and F-75 commercial metal detectors
using a variety of landmine and clutter types, and mechanically
integrating the sensors into the robotic platform.
- Design and implementation of a database for real-time storage of
position coordinates and auxiliary information from the robot via
GPS. This is needed to identify locations of possible explosive
objects prior to disposal.
- Implementation of automated navigation of the robots along a
predefined path with GPS waypoints for a complete area survey of a
test minefield.
- Setup of a test minefield with (inert) landmine simulants to
assess how well we can identify and distinguish buried
landmines and buried harmless clutter of different kinds.
Project Leaders at F&M


- Tim Bechtel (Senior Teaching Professor of Geosciences,
Department of Earth and Environment)
- Fronefield Crawford (Charles A. Dana Professor of Physics
and Astronomy, Department of Physics and Astronomy)
Current and Former Team Members at F&M
- Timilehin Adefioye (F&M '26)
- Joey Buck (F&M '24)
- Liyan Chen (F&M '28)
- Cameron Crawford (American '23)
- Gavi Fischer (F&M '25)
- Aaron DiGregorio (F&M '22)
- Youssef El Gharably (F&M '26)
- Alaa Abo El-Magd (F&M '26)
- Ileane Ho (F&M '20)
- Adem Imamovic (F&M '22)
- Stasia Kuske (F&M '19)
- Andrew Lara (F&M '24)
- Kelvin Lartey (F&M '27)
- David Li (F&M '24)
- Erik Lillegard (F&M '23)
- Ziyu Mo (F&M '23)
- Roselyn Ovalles (F&M '26)
- Lily Rodriguez (F&M '26)
- Gaby Sallai (F&M '19)
- Ethan Senatore (F&M '24)
- Inna Shapovalenko (F&M '26)
- Nina Simic (F&M '15)
- Jack Sinton (F&M '20)
- Alex Sobey-Strick (F&M '23)
- Liv Young (F&M '23)
- Yihao Zhang (F&M '23)
- Dani Zoeller (F&M '23)
Background Reading (for New Students)
News Articles, Press, and Other
-
NATO-Backed F&M Building Robots
to Detect Landmines, Franklin and Marshall College Youtube Video,
January 26, 2024
-
Demining Robots: Jackal UGV and OutdoorNav Utilized for Advanced
Landmine Detection,
In the Field: Customer Spotlight, Clearpath Robotics, October 16, 2023
- NATO Humanitarian Demining Robot Tested at F&M,
F&M News, August 31, 2023
- Students Help Program Robots for Dangerous Mission in Ukraine,
F&M News, July 19, 2022
-
Lancaster
Professors' Project in Limbo as Ukraine Crisis Puts Landmine Research
on Pause, WPMT FOX43 News, February 27, 2022
-
F&M
Professors' Research on Ukraine Landmine Removal Faces Uncertain
Future, LNP Lancaster Online, February 25, 2022
- Landmine Detection at F&M:
A Cyber-Physical Connected
Systems Approach to Landmine Detection and Reversing the Legacy of
War - F&M Faculty
Features Series, June 3, 2021
- The Slow-Motion Pandemic: Land Mines, Op Ed for
International Mine Awareness Day, 2021
- NATO Science Presents: The Robot That Goes First, NATO Science Series, January 20, 2021
- F&M virtual research fair video
presentation
of demining work at F&M presented by Aaron DiGregorio '21 in October 2020.
- Brochure for NATO SPS Project G5731: Multi-Sensor Cooperative Robots for Shallow Buried Explosive Threat Detection - DEMINING ROBOTS
- Student-Researcher Teaches Robots to Navigate Minefields, F&M News, July 13, 2020
- Time lapse video of the UGO 1st field
demo at the 2018 NATO Advanced Resarch Workshop in Florence, Italy
- New NATO
Scientific Projects to Help with the Fight Against Terrorism,
NATO Headquarters News, November 12, 2018
- Building a Robot with Lasers, Time-of-Flight Cameras and Coding, F&M News, July 16, 2018
- Ready to Launch: F&M Helps Develop Land Mine-Detection Robot, F&M News, May 2, 2018
Project Funding
This work has been funded in part by the following projects from the
NATO Science for Peace and
Security Programme: